
9月21日にリュウグウに投下された探査ロボ 2機の小型ローバ「MINERVA-II1」Rover-1A、Rover-1Bからの画像が公開されました。世界初の快挙のオンパレードです。まず、MINERVA-Ⅱ1は、小惑星表面に降りた世界初のローバ(移動探査ロボット)となりました。また、小惑星表面で自律的に移動したこと、写真撮影をしたことも世界初。「小惑星表面で移動探査をした世界初の人工物」となり、しかも、2機同時に動作させるという快挙。そして、本日、Rover-1Bが、動画撮影に成功した画像、及び最高解像度画像も公開されました。(第2弾画像がJAXAより公開)日本(Japan)の力すごい。
2018年9月21日の記事:
(はやぶさ2から、リュウグウに、探査ロボ MINERVA-Ⅱ 1(ミネルバ ツー ワン) が投下された。探査ロボのスペック等、詳細の説明はこちら)
今年6月の記事:はやぶさ2 小惑星(リュウグウ)に到着 今後、着陸し岩石を持ち帰る
今年7月の記事:はやぶさ2 リュウグウ その後 形状モデル 画像解析
目次
Rover-1B 動画撮影に成功
↑ をクリックしてください。
まずは、この素晴らしい世界を。
Rover-1Bが動画撮影に成功。
2018年9月23日10時34分から11時48分(日本時間)まで15枚取得した画像による動画。
同一地点から、1時間以上かけて連続撮影されています。
リュウグウ(小惑星)の自転により、太陽が移動する様子、表面上の岩の影の向きが変わる様子が幻想的に映し出されています。
パラパラ漫画ですが、動画と呼びます。本当に動画像で送れるわけないですからね。
データー通信速度が、はやぶさ2搭載の中継器 (OME-E)を使って、最大で32k bpsの速度なんですから。
Rover-1Bのホップ直前画像、ホッピング確認画像、再着地頃のリュウグウ表面画像
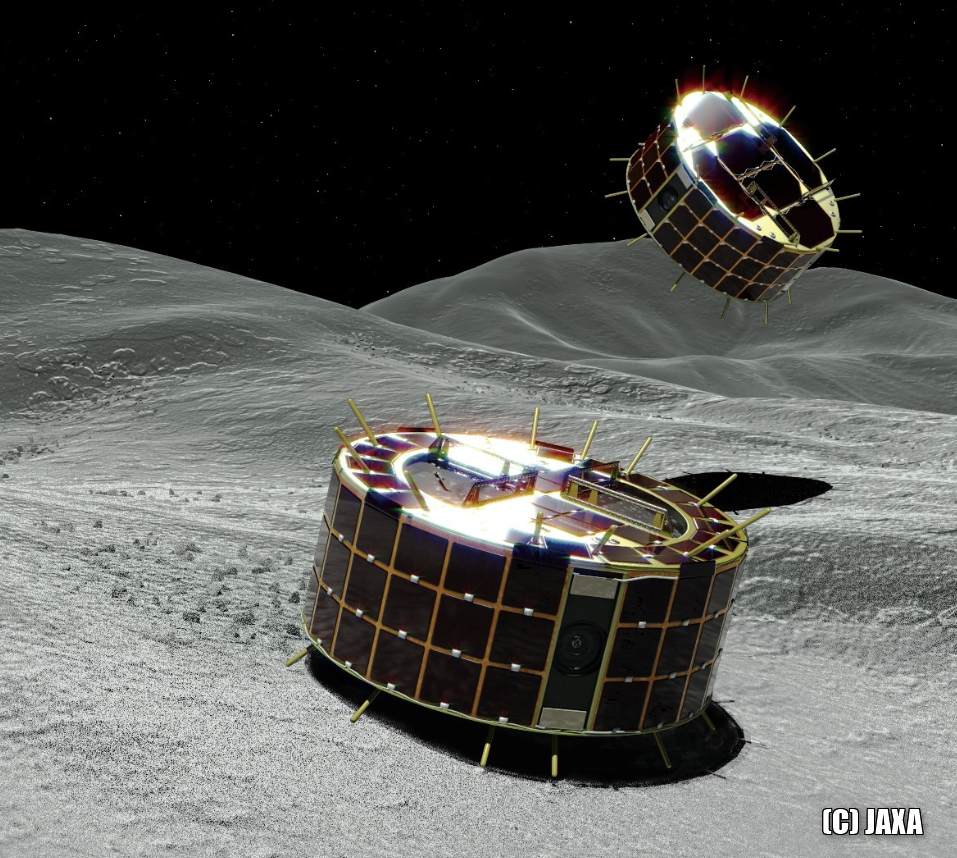
ホッピングとは、ホップ、ステップ、ジャンプのホップつまり、リュウグウをホップして、表面を移動し、探索していくイメージです。機体内部のモーターの回転によって、反動で機体そのものがホップする(飛び跳ねる)仕組みとなっている。(ホッピング機構)
上記のイメージが、実際の写真となって下記となります。ご覧あれ。

2018年9月23日09:46(日本時間)にRover-1Bのホップ直前の画像
さあ、これから、ホッピングするぞーー。飛ぶぞー。
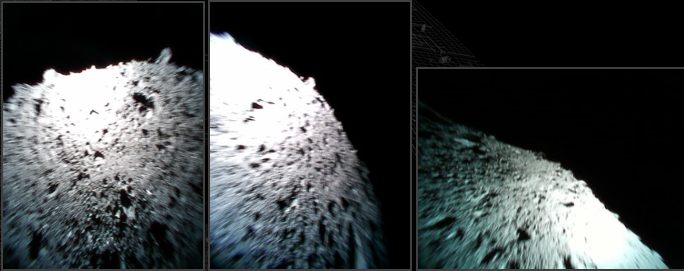
撮影時刻(日本時間):
(左) 2018/09/23 09:50
(中央) 2018/09/23 09:55
(右) 2018/09/23 10:00
ホッピングが成功したことを確認。
左から5分毎の画像(10分間くらいのホッピングだったのか?着地までしてないからまだ飛んでるな。)

その10分後。
2018年9月23日10:10(日本時間)にRover-1Bの再着地頃の表面画像
再着地したあたりの画像。やはり10分間隔くらいのホッピングのようです。
(上記3枚の画像のクレジット:JAXA)
Rover-1Aが、アンテナとピンの影を自分撮り撮影
上記イメージを見てから、下の写真をご覧ください。

2018年9月23日09:48(日本時間)にRover-1Aが撮影した表面画像。 ミネルバ2自身のアンテナとピンの影の撮影に成功。
ピンの3つの役割
1.ホップする時に摩擦を大きくするため
2.再着陸時の太陽電池の保護
3.ピンのいくつかは温度センサが付いて、表面温度を直接測定
ローバから届いた画像は、最初はブレ画像だった。(速報第1弾画像)

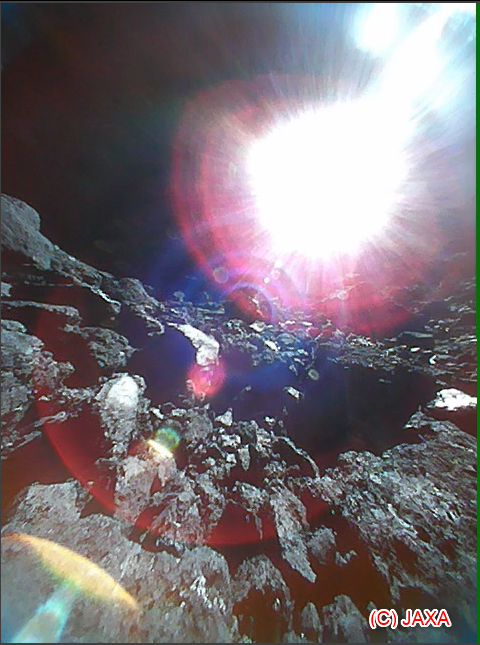
2018年9月21日、13:08(日本時間)頃にRover-1Aが撮影。カラー画像。探査機から分離直後に、「はやぶさ2」探査機(上)とリュウグウ表面(下)を撮影した。ローバが回転している状態で撮影しているので画像がぶれている。「はやぶさ2」本体と太陽電池のパドルがはっきりと分かります。パドルは青っぽく撮影されています。

2018年9月21日、13:07(日本時間)頃にRover-1Bが撮影。カラー画像。探査機から分離直後に撮影されたもの。右下にリュウグウ表面が映っている。左上の薄くモヤがかかっている部分は撮影時の太陽光の写り込みによるものである。

2018年9月22日、11:44(日本時間)頃にRover-1Aが撮影。カラー画像。リュウグウ表面において移動中(ホップ中)に撮影されたもの。左側半分がリュウグウの表面。右側の白い部分は太陽光によるもの。
■吉光 徹雄 「はやぶさ2」プロジェクト MINERVA-Ⅱ1担当
ローバから届いた画像を最初に見たときに、ブレ画像でがっかりしましたが、「はやぶさ2」探査機が写っていたので、ロボットに仕込んだ通り撮像できてよかったです。また、小惑星表面でのホップ中の画像が届いたときには、小天体での移動メカニズムの有効性を確認することができて、長年の研究成果が実を結んだことを実感しました。
9月21日に、2機の小型ローバ「MINERVA-II1」Rover-1A、Rover-1Bから撮影された画像は、ブレ画像だったり、あまりいい画像が撮れなかったようですが、(上記の吉光さんのコメントにもありますが、)最初から、鮮明な綺麗な画像が撮れる方が面白みがないというか、最初は不鮮明な画像から、だんだんと綺麗な画像が送られてくるという方が、ワクワクしますよね。
既に、9月21日の時点で、ローバー2機とも、無事に小惑星リュウグウ表面に着地して、画像や各種センサー情報を送ってきており、問題なく正常動作していた。(この日の段階で、ローバーが写真等の解析で、リュウグウ表面を移動していることも確認されていました。)
MINERVA-Ⅱ1は、小惑星表面に降りた世界初のローバ(移動探査ロボット)となりました。また、小惑星表面で自律的に移動したこと、写真撮影をしたことも世界初です。つまり、MINERVA-Ⅱ1は、「小惑星表面で移動探査をした世界初の人工物」となりました。しかも、2機同時に動作させるという快挙ともなりました。
最高解像度のリュウグウ地表画像が公開
第一弾速報の不鮮明な画像とは、うってかわって、今度は、過去、最高解像度のリュウグウ表面を。
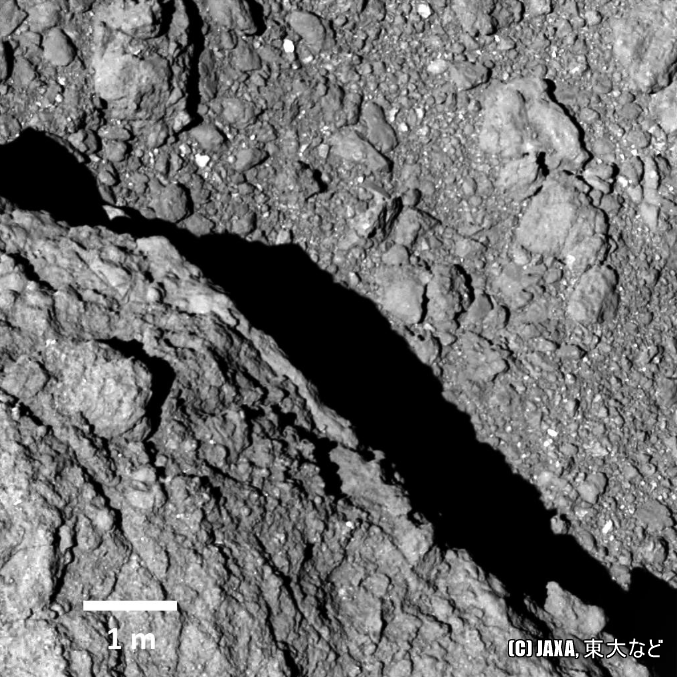
はやぶさ2がMINERVA-II1の分離運用で降下した際に、望遠カメラONC-Tでは、これまでのリュウグウ表面の写真で最高解像度になる画像が撮られました。撮影したのは、はやぶさ2ですね。非常に綺麗。岩の凹凸と様々な大きさがみえますね。
高度約64mで、ONC-Tによって撮影されたリュウグウの画像。
2018年9月21日13:04頃(日本時間)に撮影。
今後の解析結果にも、期待です。
はやぶさ2着陸、タッチダウン候補地点の確認中(リハーサル運用にて)
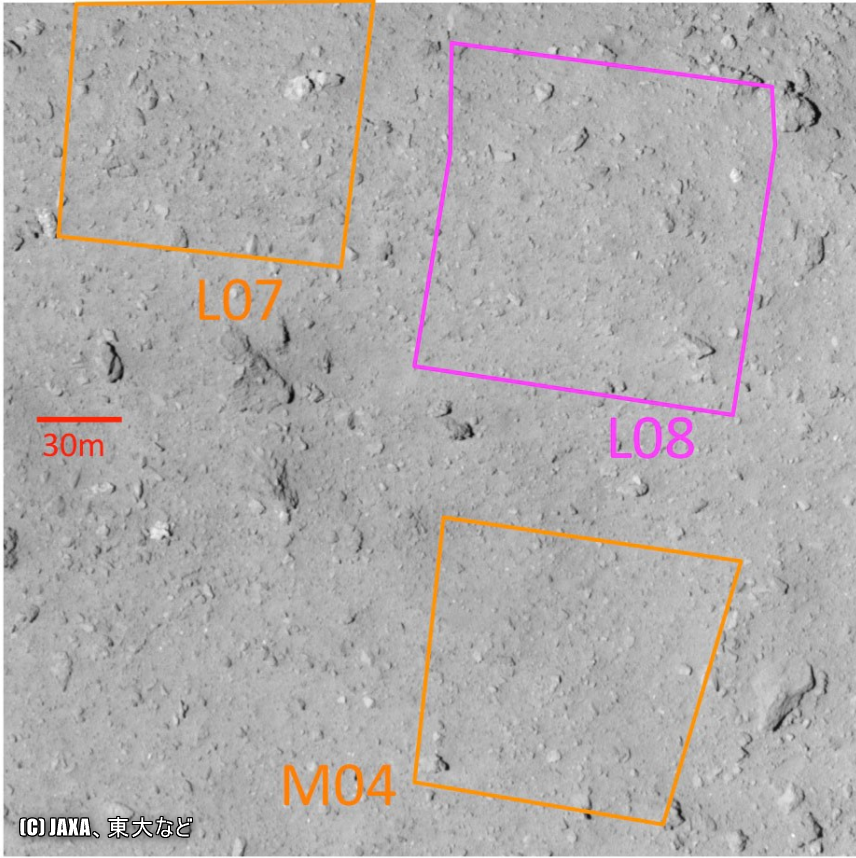
9月10日から12日にかけて、タッチダウン1リハーサル1(TD1-R1)運用において、タッチダウン候補地点の確認が行われました。タッチダウン候補地点とは、着陸候補地点のことです。ここでいう着陸地点というのは、HAYABUSA2(はやぶさ2)自体の着陸です。(母船タッチダウン)
何しろ、今回のミッションの目的は、なんと 小惑星(りゅうぐう)に、はやぶさ2が着陸して、サンプル採取して、地球に帰還するという、途方もないことですから。
JAXA(宇宙航空研究開発機構)によると、石の大きさが50センチを超えると、はやぶさ2の本体にぶつかる恐れがあるため、タッチダウン候補として、大きな岩がない場所を慎重に選ぶ必要があるとのこと。
今後、タッチダウンに向けてさらに検討が続けられます。